Part Number: DRV8308
We are having trouble limiting the startup current with Clock Frequency Mode.
Our startup can peak as up as 24A depending on motor and input voltage configuration (24V+-10%)
According to the data sheet, the SPEED register should adjust the open loop gain before Lock, but in our tests it actuality apply a gain in CLKIN resulting in a lower speed after LOCKn, and do not affect to the start current.
Our Risense is 0,02 ohms
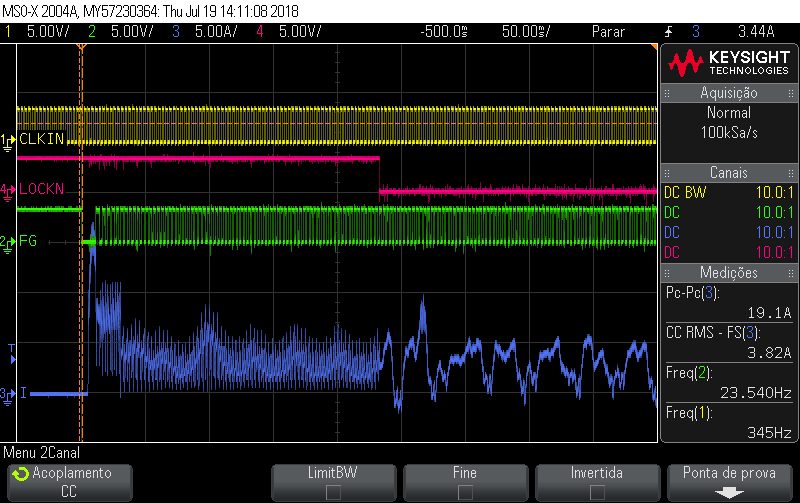
Here follow a 17A peak example, best result reached so far:
![]()
Our register configuration:
drive,speed_mode=<0>; /* closed loop mode*/
drive,pwmf = <2>; /* external FET Pwm frequency 100Khz*/
drive,fgsel= <1>; /* xor all 3 hall sensor */
drive,aa_setpt = <5>; /* ~95Hz */
drive,ag_setpt = <7>; /* ~382Hz */
drive,advance = <43>; /* ADVANCE */
drive,minspd = <5>; /* Minimal speed for lock */
drive,spdrevs = <20>; /* Hall Us required for lock */
drive,mod120 = <3970>; /* fixed for closed loop mode */
drive,intclk = <5>; /* Integrator clock */
drive,spdgain = <11>; /* closed loop gain */
drive,filk1 = <1200>; /* FILK1 */
drive,filk2 = <950>; /* FILK2 */
drive,cmpk1 = <280>; /* CMPK1 */
drive,cmpk2 = <560>; /* CMPK2 */
drive,loop_gain = <240>; /* closed loop gain */
drive,speed = <2000>; /* open loop gain ???*/
SPI write debug to confirm the data:
reg00 = [71] [84]
reg01 = [00] [2b]
reg02 = [14] [05]
reg03 = [6f] [82]
reg04 = [01] [43]
reg05 = [50] [0b]
reg06 = [04] [b0]
reg07 = [03] [b6]
reg08 = [01] [18]
reg09 = [52] [30]
reg0a = [f0] [f0]
reg0b = [07] [d0]
reg2a = [00] [00]
Any Idea to what